A manifold is a convinient mathematical structure for doing calculus: derivatives, integration, etc.
However, to do calculus, we need to introduce coordinates on the space. In short, we want manifolds to be locally like , so that we can introduce coordinates and do calculus on it.
Definition of Manifolds
A topological manifold is a Hausdorff, second-countable topological space that is locally homeomorphic to Euclidean space .
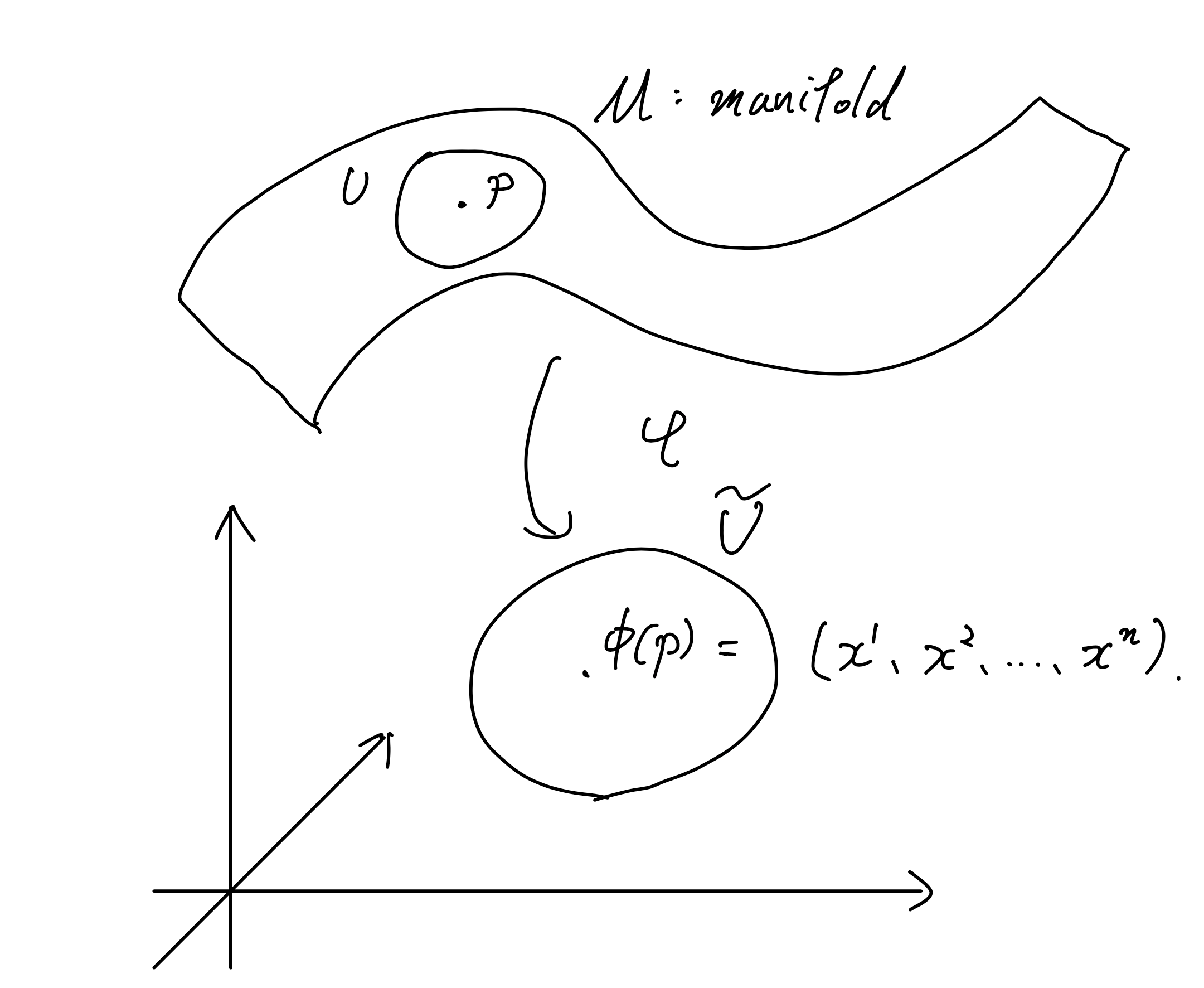
More concretely, when we have a topological manifold , we can take any point and an open neighborhood of , and there is a mapping , that “converts” points in to points in the Euclidean space .
Here, is called a coordinate map of the manifold , and is an open set in .
The pair of open set and the mapping is called a chart of the manifold .
And specifically for a point , we can write “converted” point as a coordinate in , i.e. .
This ordered set of numbers is called the local coordinate of in the chart .
Coordinate Transformations
Notice that there are no particular rules for how we choose the coordinate to represent the point .
Any coordinate can be used around , and we can switch between different coordinates by using different coordinate maps.
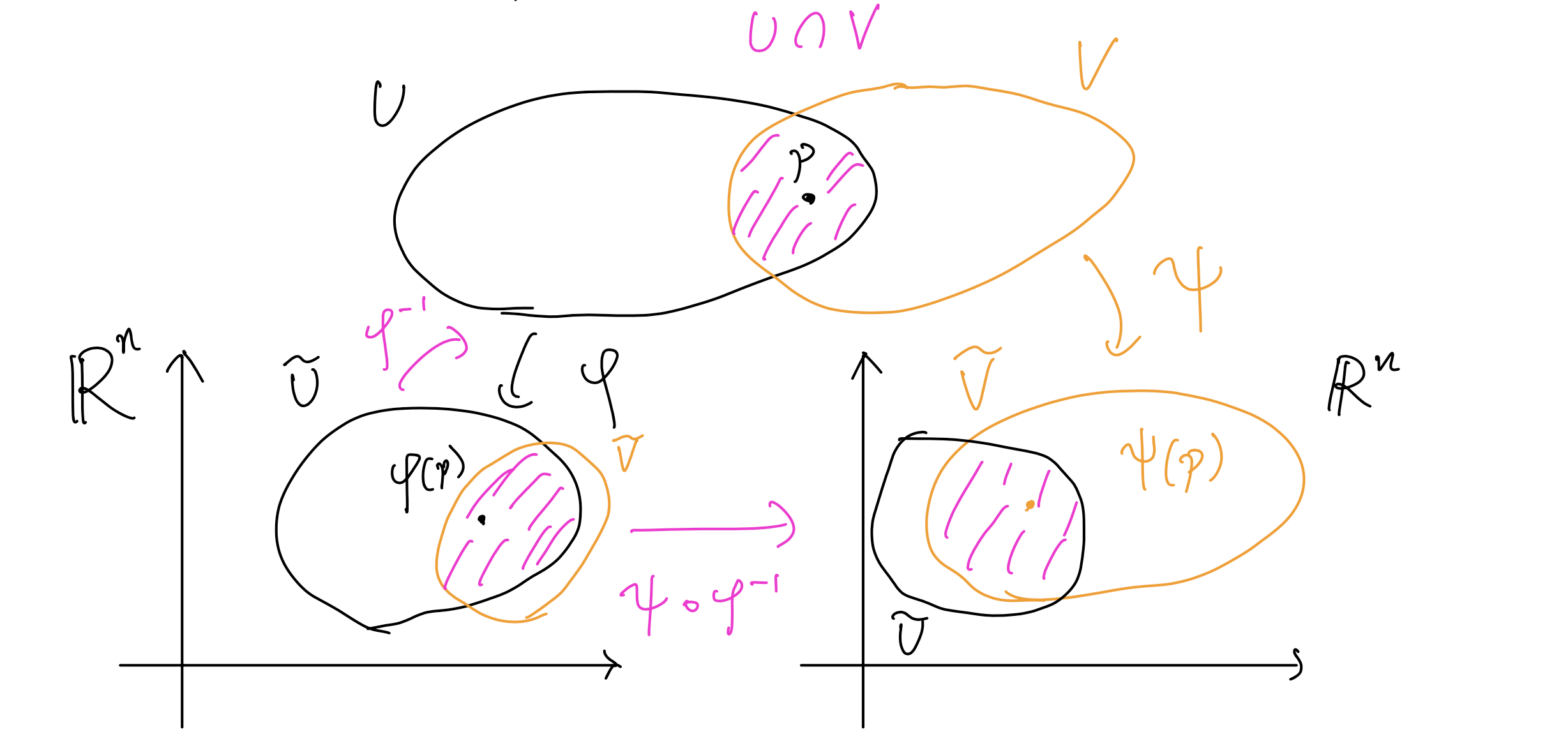
As to explain, we can take two overlapping charts and , where , and we can use either or to represent the point :
Then, the coordinate transformation between and is given by the composition of the two coordinate maps:
First we “pull back” the point to , and we “push forward” it to , which gives us the coordinate transformation between and :
The composed map is called the transition map between the two charts and .
Note that since and are homeomorphisms, the transition map is also a homeomorphism between the two open sets and in .
Differentiable Manifolds
Since the transition map is just a Euclid-to-Euclid map, we can introduce the notion of differentiability.
Take two charts and , where .
If the transition map is a -class function from , then we say that the two charts are -compatible.
Note that:
If , then the two charts are trivially -compatible.
The inverse map is also a -class function from .
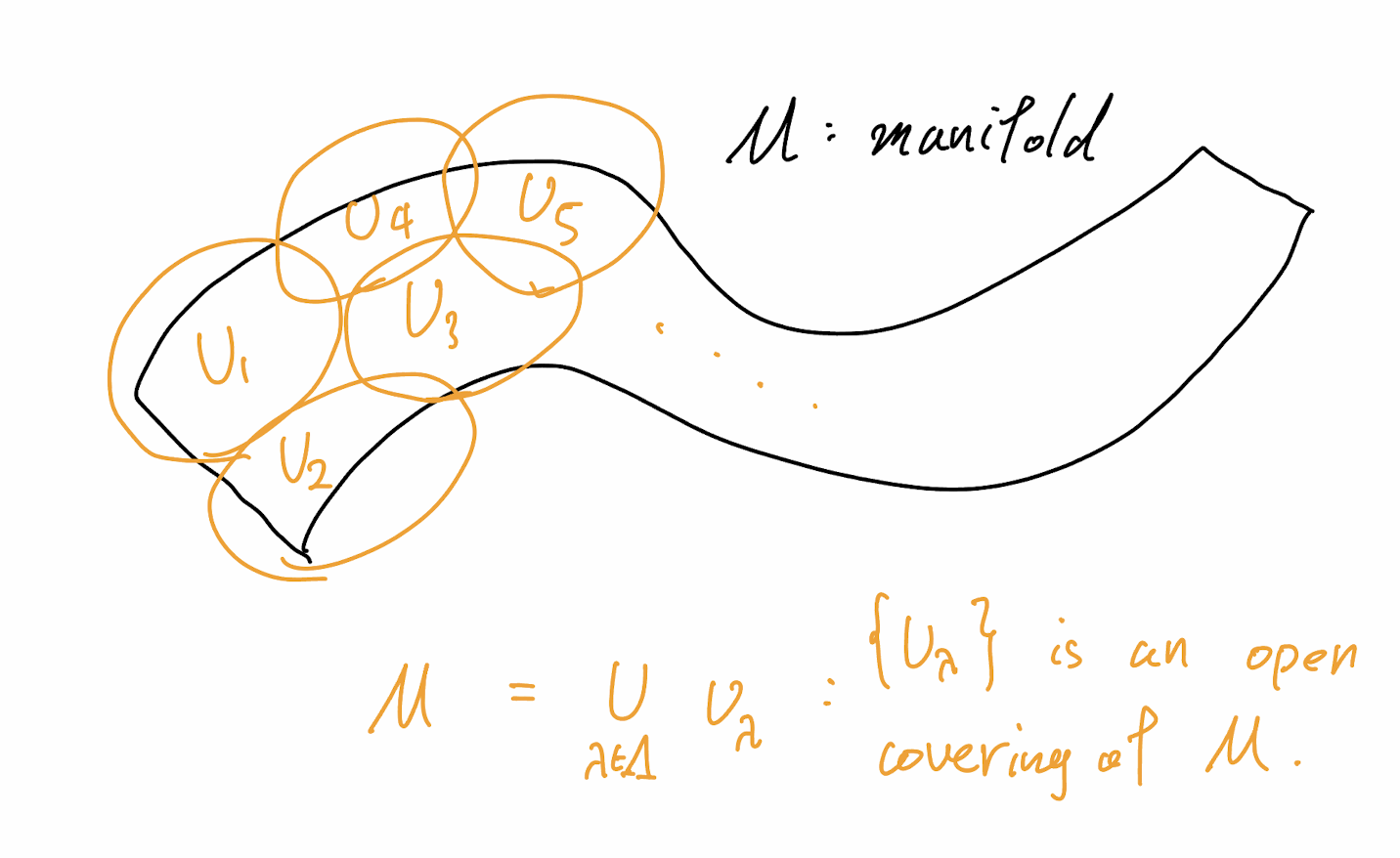
Now, a -class atlas of a topological manifold is a collection of charts such that:
The charts are an open covering of the manifold :
Any pair of charts and in the atlas are -compatible.
For a given manifold , it is possible that more than one atlas can be defined on it, and we can consider the compatibility of different atlases:
given two atlases and on the same manifold , if their union is also an atlas, then we say that and are compatible.
Furthermore, given an atlass on a manifold , we can consider the union of all atlases that are compatible with , and this set is called the maximal atlas of , denoted as or .
A topological manifold equipped with a -class maximal atlas is called a -class manifold.
If has a -class maximal atlas, then we say that is a smooth manifold.
-class Functions between Manifolds
Consider a map where and are two -class manifolds, with maximal atlases and respectively.
Take a point in , and a chart around . Then, we consider a mapped point in , and a chart around .
Note that we take and such that , so that we can write the map in terms of the coordinates of the two charts.
Then, we can write the map in terms of the coordinates as:
where .
Note that is a map from to .
If the map is a -class function in the Euclidean space, we say that
Tangent Spaces
Consider a -class manifold and a point .
Then, we have a set of parametrized -class curves that passes through :